Time Variance
Published:
Contents
- Intro to SPICE Algorithm
- Framework and your first circuit!
- More Static Linear Components
- Nonlinear and Diode
- MOSFET
- Time Variance (this article)
- Applications
Now let’s add another dimension to our simulation: time
Framework
We will use Euler’s method to make a linear approximation of time varying components with memory (cap, ind) with respect to time. This is very similar to Newton’s method, but with time as the x-axis. The component will be modelled by a current source parallel to a resistor.
This will be the outer loop of the SPICE algorithm:
stamp()the component to get its linear modelsolve()an operating pointupdate()the memory- Advance a time step
Time Varying Sources
This part is designed and written by Andrew Yang and Faustina Cheng :)
Time varying sources do not have memory. We just need \(t\) as a parameter to get its value at \(t\).
We’ll design new signatures for independent sources. We’ll show how AC functions are implemented. Again, declare a wrapper around the union on each parameter type.
typedef struct {
double vo;
double va;
double fo;
double td;
double a;
double phase;
} SpiceSinParams;
typedef struct {
double dc_value;
} SpiceDCParams
typedef enum {
SPICE_FUNC_SIN,
SPICE_FUNC_DC
} SpiceFuncType;
typedef struct {
SpiceFuncType type;
union {
SpiceSinParams sin;
SpiceDCParams dc;
} params;
} TransientSource;
The stamping function needs to be updated
void isrc_stamp(Component *c, float Gm[][MAT_SIZE], float I[]) {
(void)Gm;
ISrc *s = &c->u.isrc;
TransientSource *src = s->src;
float Ieq;
if (src->type == SPICE_FUNC_SIN) {
SpiceSinParams *params = &src->params.sin;
Ieq = params->vo + params->va * exp(-params->a * (t - params->td)) * sinf(2.0f * M_PI * params->fo * (t - params->td) + params->phase / 360.0f);
} else if (src->type == SPICE_FUNC_DC) {
Ieq = src->params.dc.dc_value;
} else {
printf("vsrc_stamp: unknown source type\n");
exit(1);
}
int n1 = s->n1, n2 = s->n2;
if (n1 != -1) I[n1] += Ieq;
if (n2 != -1) I[n2] -= Ieq;
}
As an exercise, implement the SPICE pulse source
State Holding Elements
Now to the real challenge: stamping and updating capacitors.
We used the Backwards Euler’s method: compute \(\frac{dv}{dt}\) of the next time step, and use it as the slope of the current approximation. A future work would be to use a better approximation method, such as trapezoidal or Runge-Katta
Definition
typedef struct {
int n1, n2; // nodes
float C, dt; // device constants
float v_prev; // previous values
} Cap;
Registration
void add_cap(int n1,int n2,float C,float dt,float v0) {
Component *c = &comps[ncomps++];
c->type = LIN_T;
c->stamp_lin = cap_stamp_lin;
c->stamp_nl = NULL;
c->update = cap_update;
c->u.cap = (Cap){n1,n2,C,dt,v0}; // initial conditions are 0
}
Stamping
I might be off by 1
void cap_stamp_lin(Component *c, float Gm[][MAT_SIZE], float I[]) {
Cap *p = &c->u.cap;
float Gc = p->C / p->dt;
float Ieq = -Gc * p->v_prev;
int n1 = p->n1, n2 = p->n2;
if (n1 != -1) Gm[n1][n1] += Gc;
if (n2 != -1) Gm[n2][n2] += Gc;
if (n1 != -1 && n2 != -1) {
Gm[n1][n2] -= Gc;
Gm[n2][n1] -= Gc;
}
if (n1 != -1) I[n1] -= Ieq; // Ieq is defined leaving n1, entering n2
if (n2 != -1) I[n2] += Ieq;
}
Updating
void cap_update(Component *c) {
Cap *p = &c->u.cap;
float vc = (p->n1!=-1? v[p->n1]:0) - (p->n2!=-1? v[p->n2]:0);
float Gc = p->C / p->dt;
float Ieq = -Gc * vc;
p->v_prev = vc;
}
Inductors are exactly the same, if not easier, since there is no need to convert to a Norton current source
Simulation Loop
This simulation will be an outer loop around the operating point Newton loop.
- CircuitCim keeps a local copy of the static and outer loop results, so it doesn’t have to re-stamp every component. Some
memcpy()s need to be updated to reflect that/* Main loop: linear and nonlinear */ for (int n = 0; n < nsteps; n++) { t = n * time_step; // 0. retrieve static component matrix clear_system_sta(); // 1. stamp all linear components for (int i = 0; i < ncomps; i++) { if (comps[i].type == LIN_T && comps[i].stamp) { comps[i].stamp(&comps[i], G, Ivec); } } // 2. Snapshot G, I with only linear components, and previous v float prev_v[MAT_SIZE]; memcpy(G_lin, G, sizeof G); memcpy(I_lin, Ivec, sizeof Ivec); memcpy(v_prev, v, sizeof v); // 3. Newton-Raphson loop for all nonlinear components operaing_point() // defined before // 4) final update so device states match the converged voltages for (int i = 0; i < ncomps; i++) { if (comps[i].type == LIN_T && comps[i].update) { comps[i].update(&comps[i]); } } }
LRC Circuit
With this, we can test out a second-order LRC circuit:
float time_step = 5e-6f;
int nsteps = 2000;
void setup(void) {
add_vsrc(0, -1, 2, step5);
add_res(0, 1, 10.0f);
add_ind(1, 3, 1e-3f, time_step);
add_cap(3, -1, 1e-6f, time_step);
nnodes = 4;
}
Note that time step should be at least 10 times smaller than the smallest capacitor/inductor value for an accurate simulation.
Otherwise, it looks PERFECT!
Rectifier
To test out both loops, let’s build a rectifier with a diode and a capacitor
float time_step = 5e-7f;
int nsteps = 500;
void setup(void) {
add_vsrc(0, -1, 1, sin5);
add_res(0, 2, 1.0f);
add_diode(2, 3, 1e-15f, 0.025875f);
add_cap(3, -1, 1e-6f, 5e-6f);
nnodes = 4;
}
It simulates the iconic rectifier curve, with:
- Precise diode drop
- Exponential discharge (starts very linear)
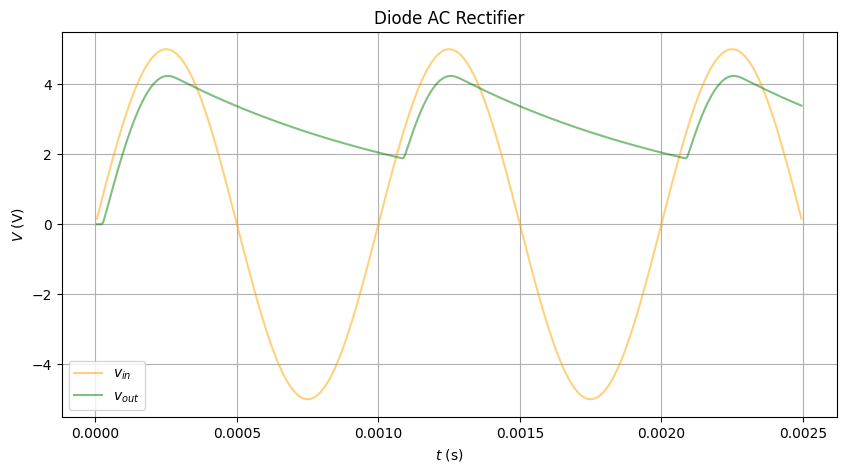
Exercise: build a bridge rectifier.